Le système de déclenchement de parachute pour drones

Bonjour, je suis Maxence Jacquot le responsable de communication du projet.
Nous sommes un groupe de trois lycéens en classe terminale du bac STI2D spécialité SIN.
En réponse à la réglementation de la DGAC (Direction Générale de l'Aviation Civile) qui oblige les drones de plus de 2kg à disposer d'un parachute embarqué; nous avons comme projet d'automatiser ce procédé.
Avec mes collègues Tristan Mainguet et Paul Ghestem nous avons pour but de présenter ce système en tant que projet de fin d'année à l’examen du Baccalauréat.
Les Schémas
Voici les premiers schémas et esquisses qui représentent notre idée du système une fois fini





Les Diagrammes SysML
Les diagrammes SysML ou Systems Modeling Language sont des langages de modélisation spécifique au domaine de l'ingénierie de systèmes. Ils permettent la spécification,l'analyse,la conception,la vérification et la validation de nombreux systèmes

Diagramme SysML des exigences du système de la télécommande au sol
Il reflète les exigences du cahier des charges du système.

Diagramme SysML des exigences du système embarqué
Celui-ci reflète les exigences du cahier des charges du système.
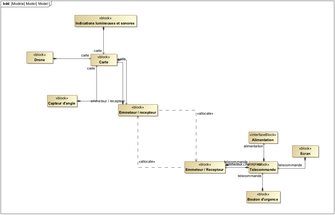
Diagramme SysML de définition de blocs
Ce diagramme est la représentation de la disposition matériel du système
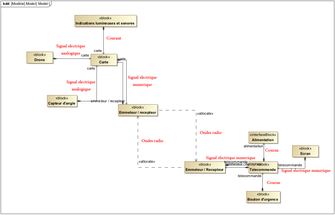
Diagramme SysML de blocs internes
Il montre les transferts d'informations et d'énergies dans les différente parties du système
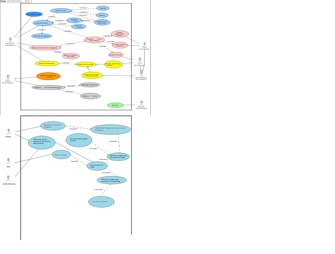
Diagramme SysML des cas d'utilisations
Celui-ci montre les interactions du système dans différent cas d'utilisations
La Création
Dès la réception des pièces nous nous concentrons sur nos taches respectives.
Paul a commencé la programmation du servo moteur. Le servo moteur est la pièce qui retien le parachute, celui-ci doit s'ouvrir si un cas de déclenchement se présente. (soit la réception d'un angle dangereux ou une activation manuel)
Pour simuler le déclenchement, Paul utilise un bouton poussoir qui remplace les dit cas de déclanchement

Tristan se concentre sur la programmation de l’écran. L'écran doit afficher diverse informations sur le système. Pour se familiariser avec le langage de programmation il a commencé par afficher un message texte.
Puis par la suite il a programmé un chronomètre

Maxence a pour but de récupérer, de convertir et d'envoyer les angles donné par l'IMU. Un IMU contient un accéléromètre ainsi qu'un gyroscope et un magnétomètre. Pour commencer Maxence a donc réalisé un programme permettant de récupérer les données de l'IMU. Par la suite il a également réussit a transférer les donnés sur une autre carte a travers un fil.

Les Tests
Après acquisition du parachute, nous avons voulue tester différentes manières de déployer et de plier celui-ci
La Galerie Photo
Photos des différent composants