
GreenSubmarine

En route pour un nouveau projet !
Bonjour, nous sommes le deuxième groupe des projets de terminale STI2D de l'année 2016-2017. Dans ce blog, nous allons vous présenter les différentes étapes de notre projet.
Présentation de l'équipe
voici les trois chercheurs et concepteurs du projet
Élève 1
Je suis Antoine GITTON, élève de SIN chargé de la localisation du sous-marin. Je m'occupe aussi principalement de tout ce qui rapporte aux fonds du projets; je suis la finance du projet.
Élève 2
Je suis Vianney Leblanc: élève de SIN chef du projet et chargé du fonctionnement, du codage et de la matérialisation du bras mécanique. En effet le système sera muni d'un bras qui permettra d'attraper des objets prédéfinis. Mon rôle est de le faire fonctionner.
Élève 3
Je suis Clément Montaz-Rosset: élève de SIN chargé du déplacement du sous-marin. Je m'occupe aussi du bon fonctionnement de la communication en alimentant ce blog.

I. Diagrammes et Conception
Pour commencer, nous allons définir le projet grâce aux diagrammes SysML (System Modeling Language/Langage de Modélisation des Systèmes). Ces diagrammes servent à comprendre un système ou une partie bien précise du système.
Le premier diagramme est celui des exigences. Ce diagramme va nous permettre de connaître les obligations de fonctionnement de notre système.

Voilà maintenant le troisième diagramme qui est celui des cas d'utilisation. Ce diagramme nous permet de comprendre comment le système fonctionne.

Sur ce diagramme nous pouvons voir comment l'utilisateur interagie avec le système et comment celui-ci varie en fonction des différents acteurs extérieurs.
Voilà ensuite le deuxième diagramme SysML qui est celui des états/transitions. Ce diagramme nous permet de présenter les différentes étapes de fonctionnement d'un système. C'est le dérouler du programme.

II. Matériaux et Branchements
Nous allons maintenant parler du matériel que nous allons utiliser.
Bras Mécanique
Vianney qui s’occupe du bras mécanique utilise des LEGO pour construire son bras.
Voici le bras qu’il construit :
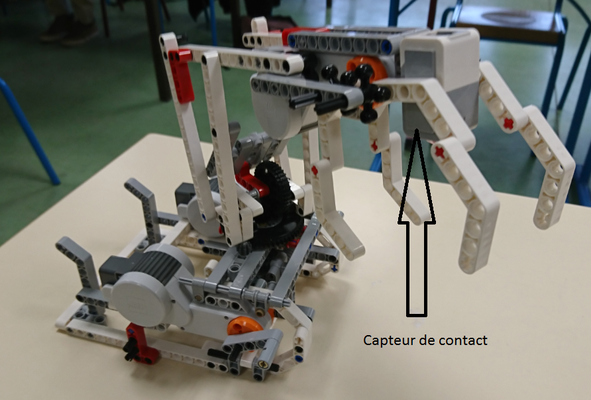
Le but premier de Vianney est avant tout de pouvoir récupérer un objet, grâce au capteur de contact à l’intérieur de la structure, les pince se referme avec l’objet à l’intérieur.
Ce bras mécanique peut faire trois mouvements, c’est un robot trois axes, on l’appelle ainsi car nous avons trois moteurs qui permettent de faire bouger le bras comme ceci :



Ici le moteur sert a faire tourner le plateau sur l’axe horizontale, grâce à un système d’engrenage on peut donc faire tourner sur la gauche ou sur la droite
Ce moteur ici permet de gérer l’inclinaison, une liaison qui permet au bras de basculer en avant et de revenir en arrière.
Le moteur ici permet d’ouvrir et de fermer la pince. Il est munie d’un capteur tactile qui permet de gérer la fermeture automatique.
Vidéo simulation
Voici une petite vidéo qui permet de constater le fonctionnement du bras
Cette simulation permet de montrer comment fonctionne le bras en situation de test:
Localisation GPS
Antoine qui s’occupe de la partie localisation du sous-marin utilise les composants suivants.


GPS que nous avons reçu
le 20 janvier.
Accéléromètre/gyroscope que nous avons reçu le 30 janvier
Voici le montage que Antoine a fait avec le GPS et l'accéléromètre.
Ce que Antoine cherche a faire avant tout c’est de transmettre a Clément (déplacement) des données concernant la position et la rotation du sous marin
pour se faire l’accéléromètre présent ici, en plus de faire de données des précisions sur la localisation, nous donne des données par rapport au tangage, à la rotation...
Le branchement du GPS se fait en série (port de communication) avec une alimentation de 5 volts, et l’accéléromètre se branche en analogique (un autre type de port de communication) avec une alimentation de 3.3 volts.

Capteur de pression que
nous avons reçu le 20 janvier.
Voici les résultats que Antoine obtient en ce moment. Il y a la date, l'heure (ne pas en tenir compte pour l'instant), la position en X/Y/Z et la rotation. Ces données ne sont pas forcément bonne car il faut faire des tests pour trouver les bonnes valeurs.
La date et l’heure est erroné du fait que le GPS ne se soit connecté à aucun satellite, le capteur n’a donc pas pu récupérer ces données. Le fix: 0 signifie que le capteur n’est connecté à aucun satellite.

Système de Sécurité
Clément qui s’occupe de la partie sécurité et déplacement utilise les composants suivants :

Le but premier de Clément est de trouver la pression relative précise ( pression en rapport avec la pression atmosphérique) pour que si la pression exercée sur le sous marin est trop forte, celui ci rentre dans un protocole de remontée rapide.
Voici le montage que Clément utilise pour faire fonctionner le capteur. Le capteur est alimenté en 3.3V, les ports du capteur DA(Données) et CL(Horloge) sont connectés au ports analogiques de la carte Arduino.

Voici une image relatant les données de du capteur de pression :

Les données si présente nous donne des précisions par rapport a la pression ambiante, la température actuelle et l’altitude du capteur.