
BARATTE Martin & BROCHIER Mayeul
Introduction :
Le projet PMRELP est né d'un constat simple : les personnes présentant un déficit d'un membre inférieur, perdent beaucoup d'autonomie dans leur vie quotidienne. De plus, ces personnes peuvent avoir besoin d'un fauteuil roulant pour se déplacer. Son utilisation s'avère être encore plus compliquée en cas de situation de malvoyance.
Le but de notre projet est d'augmenter l'autonomie des fauteuils roulants et d'assurer la sécurité des PMR à l'aide d'une étude approfondie et des différents ajouts de modules au système de base.
Nous avons donc réuni plusieurs équipes ayant des innovations uniques pour donner un projet final comportant les critères suivants:
- Le fauteuil doit réussir a monter une marche de trottoir.
- Augmenter l'autonomie de l'utilisateur et ajouter des nouvelles fonctionnalités.
- Ajouter un arceau instrumenté afin d'ajouter une sécurité lors des déplacements de
l'utilisateur
Nous nous sommes donc tous réunis dans un plus grand groupe pour trouver une solution finale comme le démontre l'image ci-dessous :
Olympiades :
Nous nous sommes présentés aux Olympiades le 05/04 à Grenoble pour présenter notre projet devant des jurys. Cela nous a permis de travailler notre oral, connaître les éventuels défauts qui peuvent y être recensés et nous permettre de perfectionner notre système, les maquettes etc. pour être le plus en phase avec la finalité visée du projet.
Présentation de l'équipe :

SCALA Mathieu
(Innovation Technologie Eco-Conception)
Chef de projet
Partie : Conception + Simulation

BROCHIER Mayeul (Système Information Numérique)
Responsable Communication
Partie : Programmation + Simulation

TSIRONY Jules
(Innovation Technologie Eco-Conception)
Responsable Organisation du Travail
Partie : Conception + Simulation

BARATTE Martin
(Système Information Numérique)
Responsable Financier
Partie : Programmation + Simulation

MEUNIER Leni
(Innovation Technologie Eco-Conception)
Responsable Planification
Partie : Conception + Simulation
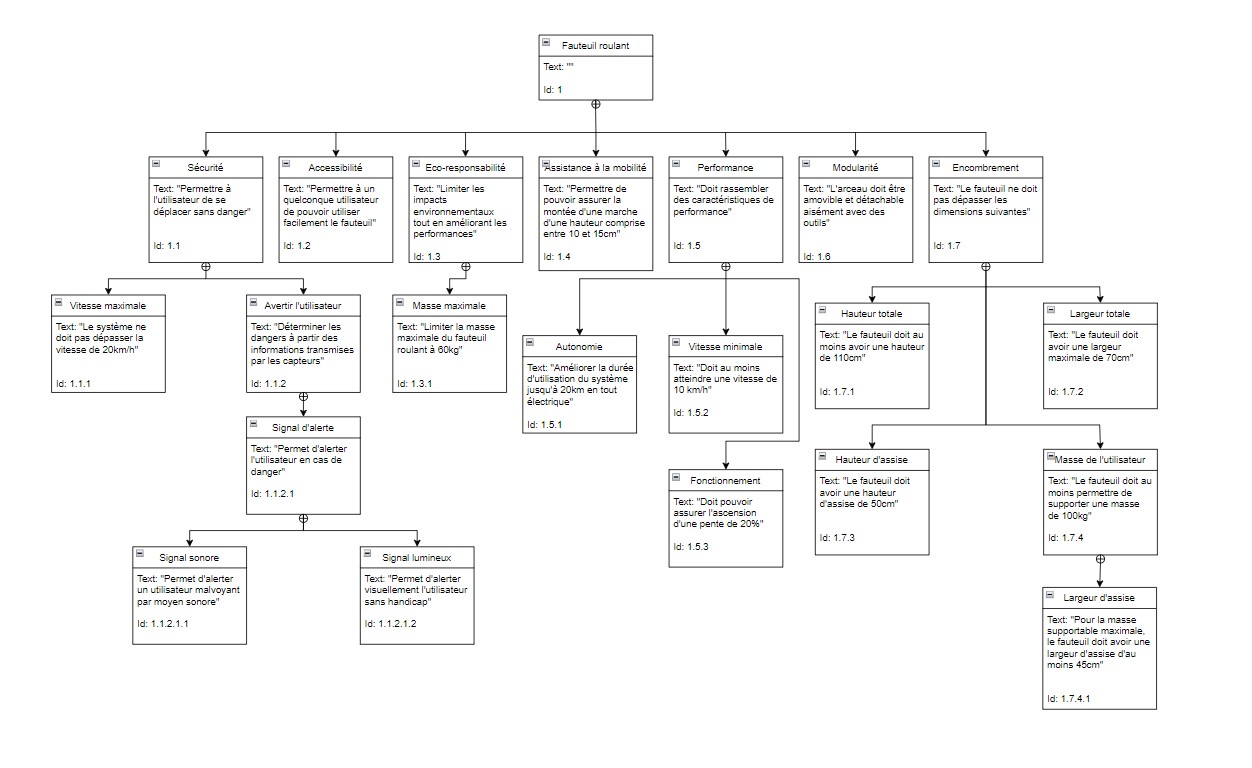
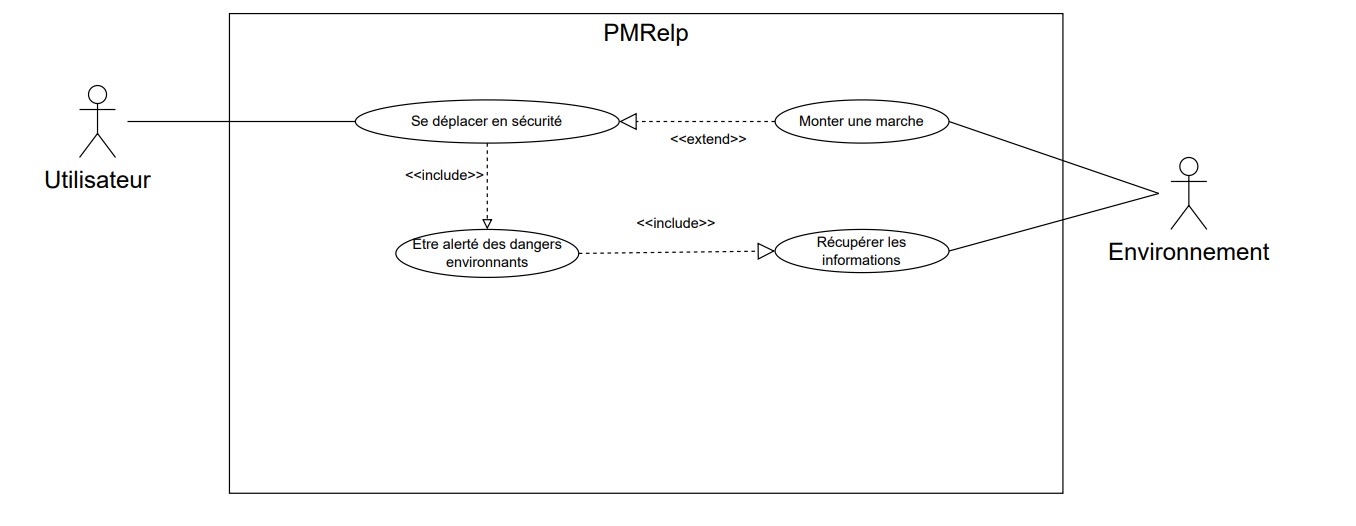
I. SYSML
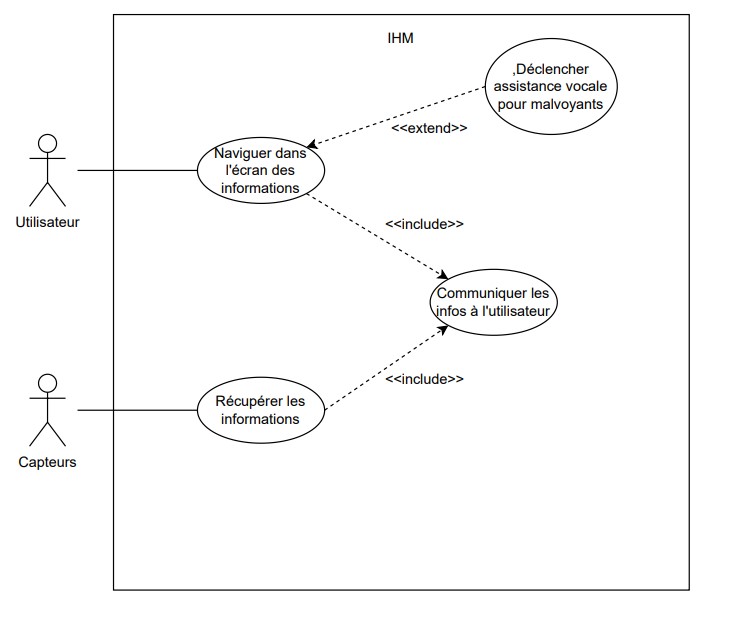
Nous avons fait un SYSML pour expliquer les principales fonctionnalités de notre IHM (Interface Homme Machine).
2. Capteur + IHM

Nous allons mettre les différentes matrices de décisions de nos capteurs et leurs programmes.
3. Motorisation

Nous allons mettre les différentes matrices de décisions et schémas de câblage du système de motorisation.
I. SYSML



II. CAPTEUR + IHM
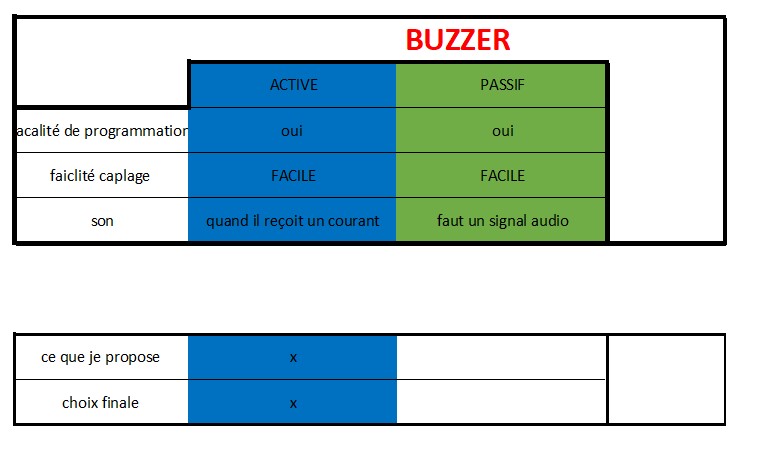
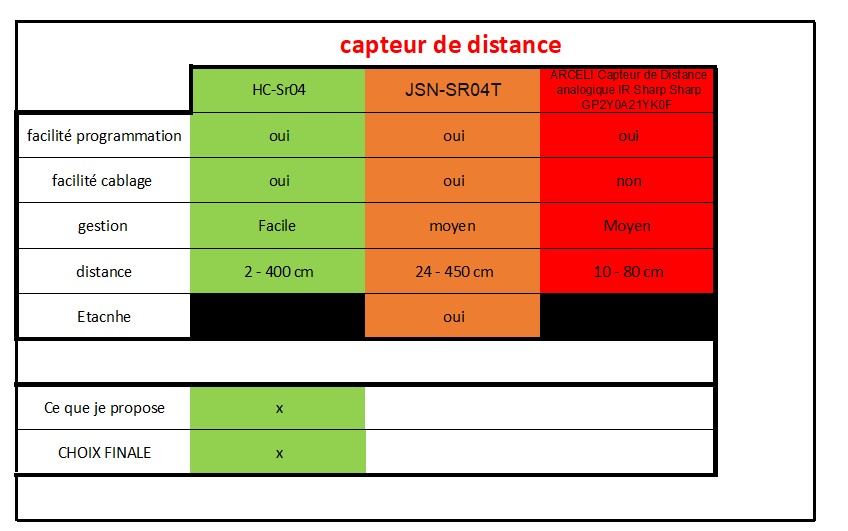
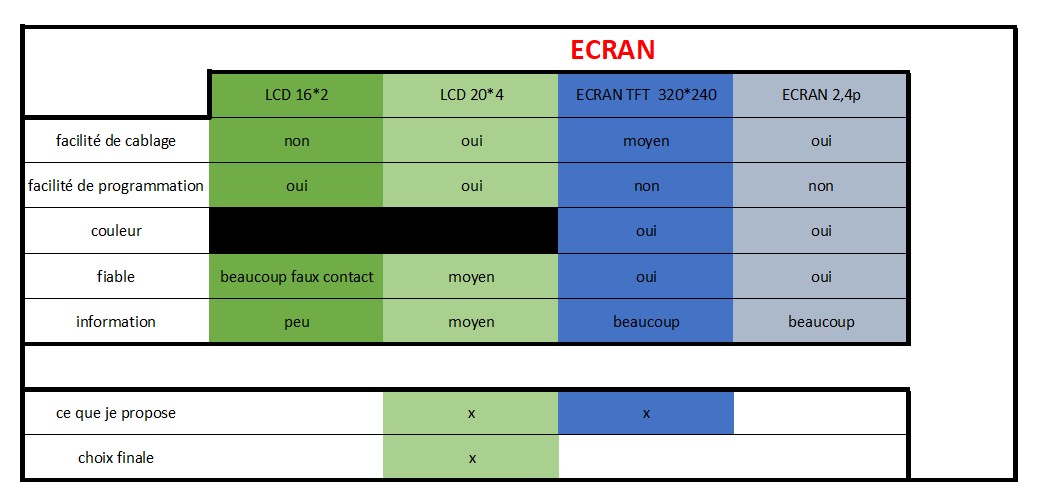
A) Matrice de décision



B) Programmation :
1 . librairie utilisée
- Ecran 20*4 = Arduino-LiquidCrystal-I2C-library/LiquidCrystal_I2C.h at master · fdebrabander/Arduino-LiquidCrystal-I2C-library · GitHub
- DHT22 = Arduino-DHT22/DHT22.h at master · nethoncho/Arduino-DHT22 · GitHub
- HC-SR04 = Ultrasonic-HC-SR04/Ultrasonic.h at master · JRodrigoTech/Ultrasonic-HC-SR04 · GitHub
- Wire = Arduino/Wire.h at master · esp8266/Arduino · GitHub
2 . code
en cours ....
Nos partenaires :

Nous avons comme premier partenaire :
Saint - Michel Annecy
Ils nous ont aidés :
- À se procurer le matériel nécessaire
- Voir si le projet est réalisable
- Apport en connaissances

Nous avons aussi un deuxième partenaire :
Handisport Bonneville
Ils nous ont apportés une aide supplémentaire :
- Sur la démarche à réaliser sur notre projet
- Les éventuels problèmes sur notre système afin de les résoudre.